Toggle navigation
电子书
题库
会员
中心
登录
注册
虚
列表
浏览次数
发布日期
双肢缀条式轴压杆件绕虚轴
x
和实轴
y
等稳定的条件是
。
计算机构的自由度。(如有复合铰链、虚约束、局部自由度请指出)
计算机构的自由度。(如有复合铰链、虚约束、局部自由度请指出)
计算图示机构的自由度,若有复合铰链、局部自由度或虚约束,必须明确指出。并判断该机构的运动是否确定,并简述理由。(标有箭头的构件为原动件)。
虚工作的特点是( )
分析集成运放的重要工具是:虚短和虚
断
。
刚体体系与变形体体系虚功原理的虚功方程两者的区别在于( )。
图2结构,求
A
,
B
两点相对线位移时,虚力状态应在两点分别施加的单位力为( )。
图2
变形体虚功原理的虚功方程中包含了力系与位移两套物理量,其中( )。
分析集成运放的重要工具是:虚
和虚
。
«
1
2
3
»
立即
投稿
微信公众账号
微信扫一扫加关注
返回
顶部
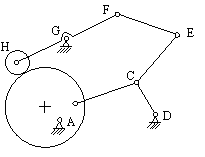
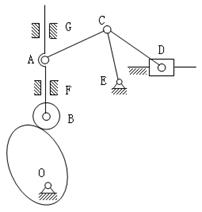

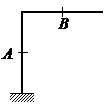 图2
图2