阅读下面算法。说明该算法的功能。Typedef char DataType;typedef struct node{DataType data;struct node *next;}ListNode;typedef ListNode *Linklist;Linklist what(Linklist h){/*h是无头结点的单链表的头指针*/{if(h&&h->next){q=h;h=h->next;p=h;while(p->next)p=p->next;p->next=q;q->next=NULL;h=q;}return(h);}
若有以下定义: struct node { int data; struct node *next; } *p,*q,*t; 指针p、t和q分别指向图中所示结点: p t q ↓ ↓ ↓ ┌──┬──┐ ┌──┬──┐ ┌──┬──┐ │data│next┼→│data│next┼→│data│next┼→... └──┴──┘ └──┴──┘ └──┴──┘ 现要将t和q所指结点的先后位置交换,同时要保持链表的连续,以下错误的程序段是( )
若有以下定义: struct node { int data; struct node *next; } *p,*q; 已建立如下图所示的链表: ┌──┬──┐ ┌──┬──┐ ... p →│data│next┼→│data│NULL│ └──┴──┘ └──┴──┘ ┌──┬──┐ q →│data│next│ └──┴──┘ 不能将指针q所指结点连到上图所示链表末尾的语句是( )。
若有以下定义: struct node { int data; struct node *next; } *p,*q,*t; 指针p、t和q分别指向图中所示结点: p t q ↓ ↓ ↓ ┌──┬──┐ ┌──┬──┐ ┌──┬──┐ │data│next┼→│data│next┼→│data│next┼→... └──┴──┘ └──┴──┘ └──┴──┘ 现要将t和q所指结点的先后位置交换,同时要保持链表的连续,以下错误的程序段是( )
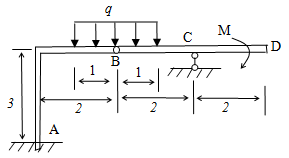
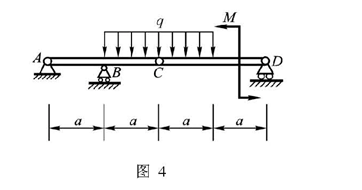
在如图所示结构中,直角弯杆AB与水平杆BD在B处铰接,已知均布载荷的集度q=5kN/m,力偶矩的大小M=30kN·m,各杆尺寸如图所示,单位为m,不计各杆的自重和各接触处摩擦。试求固定端约束A和可动铰支座C处的约束力。